



一鍵發布任務
發布成功
發布成功
贊賞金額:
支付金額:5元
支付方式:
贊賞成功!
你的贊賞是對作者最大的肯定~?

專欄總目錄
CAN (controller Area Network)
CAN BUS:控制器局域網絡總線
目前世界上絕大多數汽車制造廠商都采用CAN總線來實現汽車內部控制系統之間的數據通信。
RK3568/RK3588的CAN驅動文件:drivers/net/can/rockchip/rockchip_canfd.c
rockchip_linux_defconfig配置:
CONFIG_CAN=yCONFIG_CAN_DEV=yCONFIG_CAN_ROCKCHIP=yCONFIG_CANFD_ROCKCHIP=y
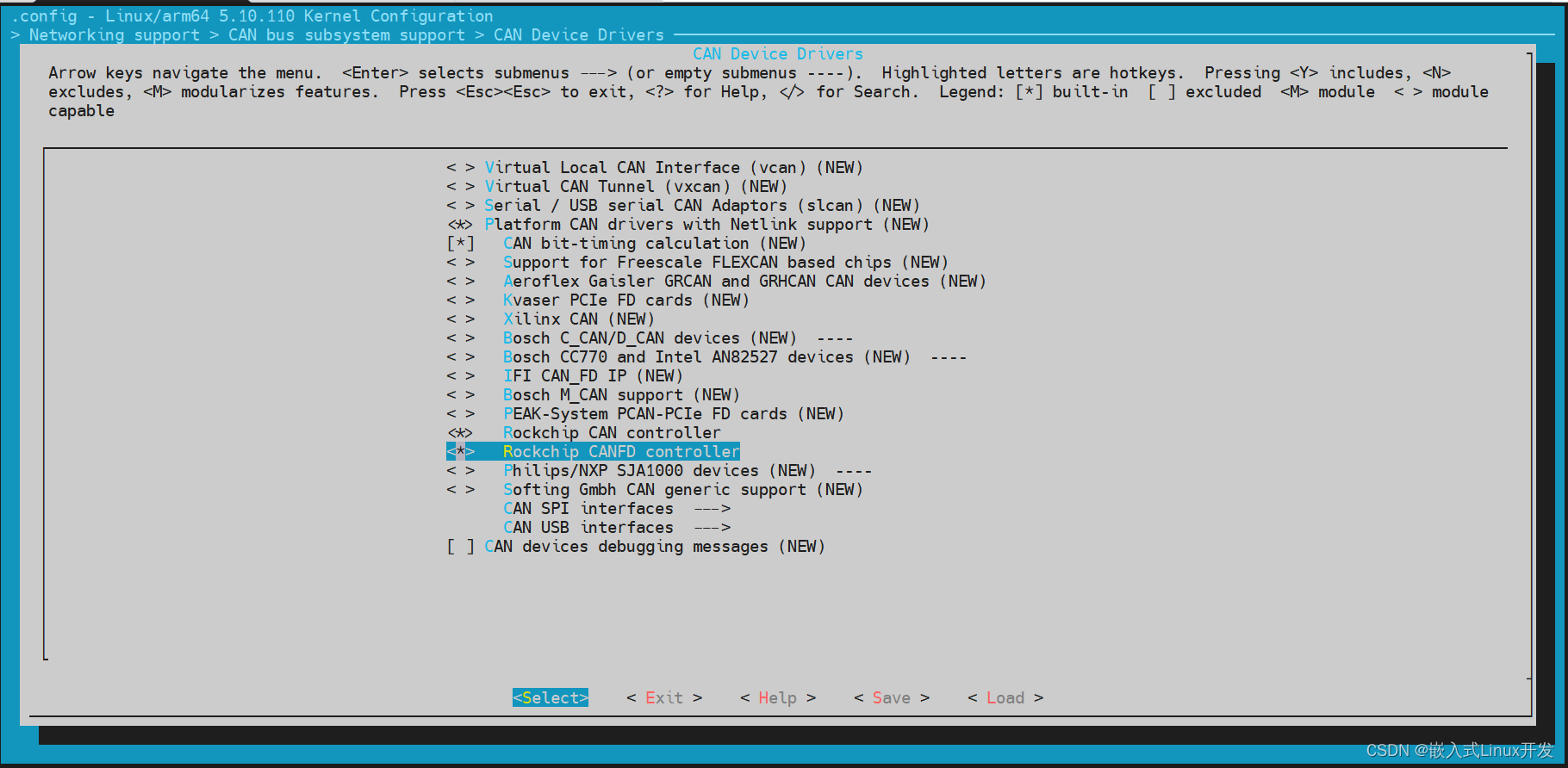
內核配置:
cd kernelmake ARCH=arm64 menuconfigmake savedefconfig
選擇:Networking support —> CAN bus subsystem support ()—>CAN Device Drivers() —> Platform CAN drivers with Netlink support(*)
interrupts =
轉換完成,產生中斷信號。
clock
時鐘屬性,用于驅動開關clk,reset屬性,用于每次復位總線。
pinctrl
can1: can@fea60000 {
compatible = "rockchip,can-2.0";
reg =<0x0 0xfea60000="" 0x0="" 0x1000="">;
interrupts =
clocks = <&cru clk_can1="">, <&cru pclk_can1="">;
clock-names = "baudclk", "apb_pclk";
resets = <&cru srst_can1="">, <&cru srst_p_can1="">;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can1m0_pins>;
tx-fifo-depth =<1>;
rx-fifo-depth =<6>;
status = "disabled";
};
compatible = “rockchip,can-1.0” ,rockchip,can-1.0用來匹配can控制器驅動。
compatible = “rockchip,can-2.0” ,rockchip,can-2.0用來匹配canfd控制器驅動。
assigned-clock-rates用來配置can的始終頻率,如果CAN的比特率低于等于3M建議修改CAN時鐘到100M,信號更穩定。高于3M比特率的,時鐘設置200M就可以。
pinctrl配置:根據實際板卡連接情況配置can_h和can_l的iomux作為can功能使用。
/* can1 */ &can1 {
status = "okay";
assigned-clocks = <&cru clk_can1="">;
assigned-clock-rates =<200000000>;
pinctrl-names = "default";
pinctrl-0 = <&can1m1_pins>; //根據原理圖配置 };
由于系統根據上述dts節點創建的CAN設備只有一個,而第一個創建的設備為CAN0
查詢當前?絡設備:
ifconfig -a
CAN啟動
ip link set can0 down //關閉CAN
ip link set can0 type can bitrate 500000 //設置?特率500KHz
ip -details -statistics link show can0 //打印can0信息
ip link set can0 up //啟動CAN
CAN發送
cansend can0 123#DEADBEEF //發送(標準幀,數據幀,ID:123,date:DEADBEEF)
cansend can0 123#R //發送(標準幀,遠程幀,ID:123)
cansend can0 00000123#12345678 //發送(擴展幀,數據幀,ID:00000123,date:DEADBEEF)
cansend can0 00000123#R //發送(擴展幀,遠程幀,ID:00000123)
CAN接收
candump can0 //candump can0
你的贊賞是對作者最大的肯定


















